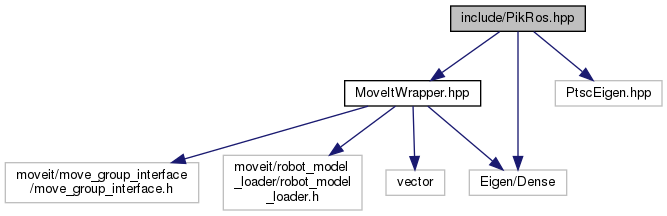
Include dependency graph for PikRos.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | PikRos::IkTask |
| Ik task structure. More... | |
| struct | PikRos::Settings |
| Solver settings. More... | |
| class | PikRos::Gradient |
| Gradient class. More... | |
| class | PikRos::Pik |
| Prioritized inverse kinematics solver. More... | |
Enumerations | |
| enum | PikRos::IkTaskType { FRAME_POSITION, PikRos::FRAME_ORIENTATION, PikRos::FRAME_POSE, PikRos::FRAME_APPROACH_AXIS } |
| enum | ApproachAxis { X, Y, Z } |
Detailed Description
- Copyright
- Released under the terms of the BSD 3-Clause License
- Date
- 2023
Enumeration Type Documentation
◆ IkTaskType
| enum PikRos::IkTaskType |
